
https://github.com/boldstelvis/BMC_SBUS ... /README.md
to use this: https://www.kinowheels.com/
with this: https://forum.dji.com/thread-167232-1-1.html
this is the connections: https://forum11.djicdn.com/data/attachm ... htjjsl.png
{kind=link}
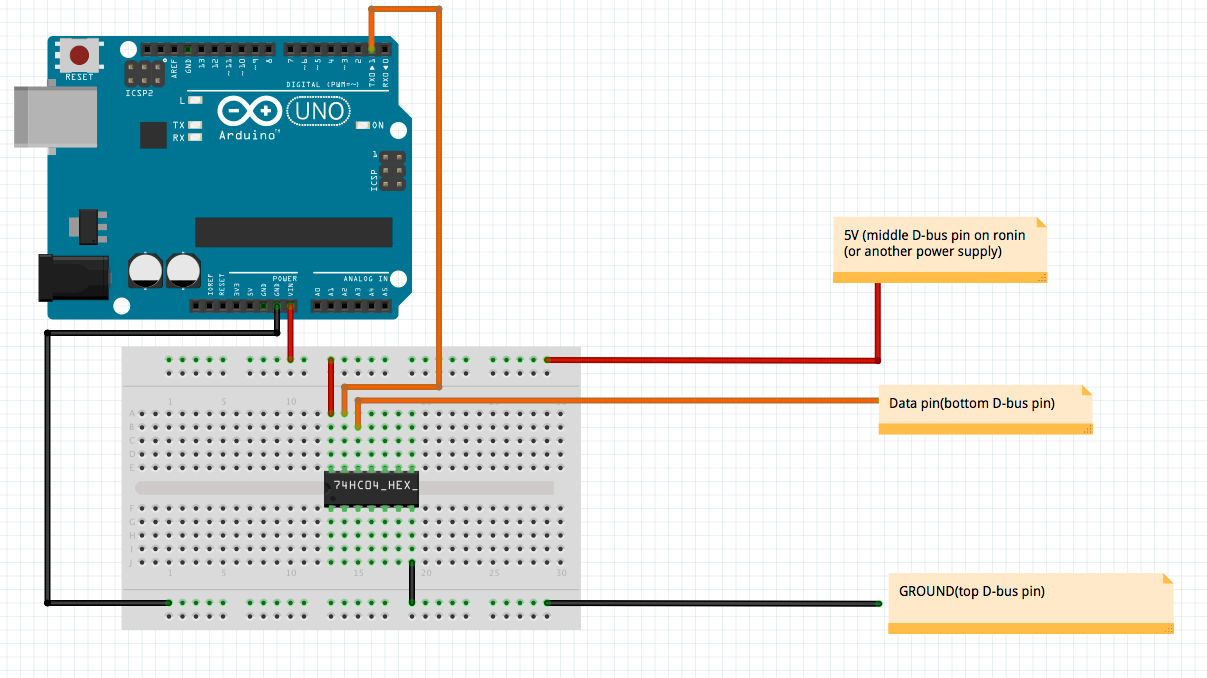
this is the Arduino Mega sketch connected to the ronin D-bus (it works!! I can move the ronin X and Y axis):
Code: Select all
#define BAUDRATE 100000 // oder 100000 115200
#define SERIALPORT Serial // - uncomment this line if using an arduino based board with more than one HW serial port
class BMC_SBUS
{
public:
uint8_t sbusData[25];
int16_t servos[18];
void begin(void);
void Servo(uint8_t ch, int16_t position);
void Send(void);
void Update(void);
private:
uint8_t byte_in_sbus;
uint8_t bit_in_sbus;
uint8_t ch;
uint8_t bit_in_servo;
};
void BMC_SBUS::begin()
{
//intialise private data arrays
//sbus_data is formatted for correct serial output
//note that the actual 11bit sbus data for each channel is embedded across multiple data bytes in a very stange order
//byte 1 and bytes 24 and 25 should be left as is
//the first is a start byte, the last is a stop byte and the second last holds various flags
//servos is the internal per channel position and is more straightforward - one int_16 per channel
uint8_t loc_sbusData[25] = {0x0f,0x01,0x04,0x20,0x00,0xff,0x07,0x40,0x00,0x02,0x10,0x80,0x2c,0x64,0x21,0x0b,0x59,0x08,0x40,0x00,0x02,0x10,0x80,0x00,0x00};
int16_t loc_servos[18] = {1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,1023,0,0};
//setup serial port to transmit at 100k baud and use 1 parity and 2 stop bits
SERIALPORT.begin(BAUDRATE, SERIAL_8E2);
//setup public data arrays
memcpy(sbusData,loc_sbusData,25);
memcpy(servos,loc_servos,18);
}
void BMC_SBUS::Servo(uint8_t ch, int16_t position)
{
//set servo position on single channel
if ((ch>0)&&(ch<=16))
{
constrain (position, 0, 2048); //keep within min/max values
servos[ch-1] = position; //expects a non zero starting index to the channel
}
}
void BMC_SBUS::Send(void)
{
//send data over serial port
SERIALPORT.write(sbusData, 25); //according to docs for Serial we can send the array along as is without a loop
}
void BMC_SBUS::Update(void)
{
//update positions for all servo channels within the SBUS data frame
//ignores digital servos and any failsafe mode stuff that was originally written
//clear out existing sbus data for all channel data bytes
//ignores first and last bytes in the array (start and stop bytes)
//mapping loop relies on initial 0 values - do not omit this step!
uint8_t i;
for (i=1; i<24; i++)
{
sbusData[i] = 0;
}
//reset counters
ch = 0;
bit_in_servo = 0;
byte_in_sbus = 1;
bit_in_sbus = 0;
//format sbus data - maps sevo data array to sbus data array 1bit at a time
//correctly deals with the little endian byte order in the process
for (i=0; i<176; i++) //16channels*11bits = 176bits
{
if (servos[ch] & (1<<bit_in_servo)) //bitwise AND to check if the correct servo databit is set to 1
{
sbusData[byte_in_sbus] |= (1<<bit_in_sbus); //bitwise OR sets the correct sbus databit if true
}
//increment bit counters
bit_in_sbus++;
bit_in_servo++;
//if end of sbus byte reset sbus bit counter and increment sbus byte counter
if (bit_in_sbus == 8)
{
bit_in_sbus = 0;
byte_in_sbus++;
}
// if we have reached bit 11 in the servo data increment channel index and reset servo bit counter
if (bit_in_servo == 11)
{
bit_in_servo = 0;
ch++;
}
}
}
//Declare BMC_SBUS Object
BMC_SBUS mySBUS;
// Sbus delay value
const int sbusWAIT = 7; //frame timing delay in msecs
// Declare sbus control channels
int panChannel = 1;
int tiltChannel = 2;
int rollChannel = 4;
// Declare Kinowheels Stuff
int XA_SIG=0, XB_SIG=1, YA_SIG=0, YB_SIG=1, pulsesX, pulsesY;
// Declare Stuff for calculating Speed
int xStampEnd=0, yStampEnd=0, timeStampEnd=0, xPassed, yPassed, timePassed, sendX=1023, sendY=1023;
void setup() {
// Serial.begin(100000); überflüssig, weil in MC_SBUS enthalten
// Start KinoWheels Stuff
attachInterrupt(0, XA_RISE, RISING); // Pin 2
attachInterrupt(1, XB_RISE, RISING); // Pin 3
attachInterrupt(4, YA_RISE, RISING); // Pin 19
attachInterrupt(5, YB_RISE, RISING); // Pin 18
// Start BMC_SBUS object
mySBUS.begin();
}
void loop() {
for (int i=0; i<1; i++){ //SBUS needs data every 7 Milliseconds. I repeat it three times for some time to pass for calculating speeds.
mySBUS.Servo(tiltChannel,sendY);
mySBUS.Servo(panChannel,sendX);
// Update SBUS object and send data
mySBUS.Update();
mySBUS.Send();
delay(sbusWAIT);
}
timePassed = millis() - timeStampEnd;
xPassed = xStampEnd - pulsesX;
yPassed = pulsesY - yStampEnd;
sendX = 1023 + 100* xPassed / timePassed;
sendY = 1023 + 100* yPassed / timePassed;
for (int i=0; i<1; i++){ //Maybe this one is not needed. Will find it out later
mySBUS.Servo(tiltChannel,sendY);
mySBUS.Servo(panChannel,sendX);
// Update SBUS object and send data
mySBUS.Update();
mySBUS.Send();
delay(sbusWAIT);
}
xStampEnd = pulsesX;
yStampEnd = pulsesY;
timeStampEnd = millis();
}
//Rotary Encoder Stuff by KinoWheels
void XA_RISE(){
detachInterrupt(0);
//delay(1);
XA_SIG=1;
if(XB_SIG==0)
pulsesX++;//moving forward
if(XB_SIG==1)
pulsesX--;//moving reverse
attachInterrupt(0, XA_FALL, FALLING);
}
void XA_FALL(){
detachInterrupt(0);
//delay(1);
XA_SIG=0;
if(XB_SIG==1)
pulsesX++;//moving forward
if(XB_SIG==0)
pulsesX--;//moving reverse
attachInterrupt(0, XA_RISE, RISING);
}
void XB_RISE(){
detachInterrupt(1);
//delay(1);
XB_SIG=1;
if(XA_SIG==1)
pulsesX++;//moving forward
if(XA_SIG==0)
pulsesX--;//moving reverse
attachInterrupt(1, XB_FALL, FALLING);
}
void XB_FALL(){
detachInterrupt(1);
//delay(1);
XB_SIG=0;
if(XA_SIG==0)
pulsesX++;//moving forward
if(XA_SIG==1)
pulsesX--;//moving reverse
attachInterrupt(1, XB_RISE, RISING);
}
void YA_RISE(){
detachInterrupt(4);
//delay(1);
YA_SIG=1;
if(YB_SIG==0)
pulsesY++;//moving forward
if(YB_SIG==1)
pulsesY--;//moving reverse
attachInterrupt(4, YA_FALL, FALLING);
}
void YA_FALL(){
detachInterrupt(4);
//delay(1);
YA_SIG=0;
if(YB_SIG==1)
pulsesY++;//moving forward
if(YB_SIG==0)
pulsesY--;//moving reverse
attachInterrupt(4, YA_RISE, RISING);
}
void YB_RISE(){
detachInterrupt(5);
//delay(1);
YB_SIG=1;
if(YA_SIG==1)
pulsesY++;//moving forward
if(YA_SIG==0)
pulsesY--;//moving reverse
attachInterrupt(5, YB_FALL, FALLING);
}
void YB_FALL(){
detachInterrupt(5);
//delay(1);
YB_SIG=0;
if(YA_SIG==0)
pulsesY++;//moving forward
if(YA_SIG==1)
pulsesY--;//moving reverse
attachInterrupt(5, YB_RISE, RISING);
}this in what I done ... but I have not Y axe control....
M5Stack---------ronin D-bus
grd---------------grd
5V----------------5V
TXD2(G17)------data
Code: Select all
#include <M5Stack.h>
#include <ESP32Encoder.h>
ESP32Encoder encoderX;
ESP32Encoder encoderY;
#define BAUDRATE 100000 // oder 100000 115200
#define SERIALPORT Serial2 // - uncomment this line if using an arduino based board with more than one HW serial port
class BMC_SBUS
{
public:
uint8_t sbusData[25];
int16_t servos[18];
void begin(void);
void Servo(uint8_t ch, int16_t position);
void Send(void);
void Update(void);
private:
uint8_t byte_in_sbus;
uint8_t bit_in_sbus;
uint8_t ch;
uint8_t bit_in_servo;
};
void BMC_SBUS::begin()
{
//intialise private data arrays
//sbus_data is formatted for correct serial output
//note that the actual 11bit sbus data for each channel is embedded across multiple data bytes in a very stange order
//byte 1 and bytes 24 and 25 should be left as is
//the first is a start byte, the last is a stop byte and the second last holds various flags
//servos is the internal per channel position and is more straightforward - one int_16 per channel
uint8_t loc_sbusData[25] = {0x0f, 0x01, 0x04, 0x20, 0x00, 0xff, 0x07, 0x40, 0x00, 0x02, 0x10, 0x80, 0x2c, 0x64, 0x21, 0x0b, 0x59, 0x08, 0x40, 0x00, 0x02, 0x10, 0x80, 0x00, 0x00};
int16_t loc_servos[18] = {1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 1023, 0, 0};
//setup serial port to transmit at 100k baud and use 1 parity and 2 stop bits
SERIALPORT.begin(BAUDRATE, SERIAL_8E2);
//setup public data arrays
memcpy(sbusData, loc_sbusData, 25);
memcpy(servos, loc_servos, 18);
}
void BMC_SBUS::Servo(uint8_t ch, int16_t position)
{
//set servo position on single channel
if ((ch > 0) && (ch <= 16))
{
constrain (position, 0, 2048); //keep within min/max values
servos[ch - 1] = position; //expects a non zero starting index to the channel
}
}
void BMC_SBUS::Send(void)
{
//send data over serial port
SERIALPORT.write(sbusData, 25); //according to docs for Serial we can send the array along as is without a loop
}
void BMC_SBUS::Update(void)
{
//update positions for all servo channels within the SBUS data frame
//ignores digital servos and any failsafe mode stuff that was originally written
//clear out existing sbus data for all channel data bytes
//ignores first and last bytes in the array (start and stop bytes)
//mapping loop relies on initial 0 values - do not omit this step!
uint8_t i;
for (i = 1; i < 24; i++)
{
sbusData[i] = 0;
}
//reset counters
ch = 0;
bit_in_servo = 0;
byte_in_sbus = 1;
bit_in_sbus = 0;
//format sbus data - maps sevo data array to sbus data array 1bit at a time
//correctly deals with the little endian byte order in the process
for (i = 0; i < 176; i++) //16channels*11bits = 176bits
{
if (servos[ch] & (1 << bit_in_servo)) //bitwise AND to check if the correct servo databit is set to 1
{
sbusData[byte_in_sbus] |= (1 << bit_in_sbus); //bitwise OR sets the correct sbus databit if true
}
//increment bit counters
bit_in_sbus++;
bit_in_servo++;
//if end of sbus byte reset sbus bit counter and increment sbus byte counter
if (bit_in_sbus == 8)
{
bit_in_sbus = 0;
byte_in_sbus++;
}
// if we have reached bit 11 in the servo data increment channel index and reset servo bit counter
if (bit_in_servo == 11)
{
bit_in_servo = 0;
ch++;
}
}
}
//Declare BMC_SBUS Object
BMC_SBUS mySBUS;
// Sbus delay value
const int sbusWAIT = 7; //frame timing delay in msecs
// Declare sbus control channels
int panChannel = 1;
int tiltChannel = 2;
int rollChannel = 4;
float pulsesX, pulsesY;
int xStampEnd = 0;
int yStampEnd = 0;
int timeStampEnd = 0;
int xPassed;
int yPassed;
int timePassed;
int sendX;// ??????
int sendY;// ??????
// Declare Poti Values
int potiX = 100;
int potiY = 100;
bool PANTILTtoggle = 0;
void setup() {
M5.begin();
// clear the encoder's raw count and set the tracked count to zero
encoderX.clearCount();
encoderY.clearCount();
// Attache pins for use as encoder pins
encoderX.attachHalfQuad(2, 3);
encoderY.attachHalfQuad(36, 35);
M5.update();
sendX = 1023;
sendY = 1023;
// Start BMC_SBUS object
mySBUS.begin();
}
void loop() {
pulsesX = encoderX.getCount();
pulsesY = encoderY.getCount();
for (int i = 0; i < 1; i++) { //SBUS needs data every 7 Milliseconds. I repeat it three times for some time to pass for calculating speeds.
mySBUS.Servo(tiltChannel, sendY);
mySBUS.Servo(panChannel, sendX);
// Update SBUS object and send data
mySBUS.Update();
mySBUS.Send();
delay(sbusWAIT);
}
timePassed = millis() - timeStampEnd;
xPassed = xStampEnd - pulsesX;
yPassed = pulsesY - yStampEnd;
M5.update();
sendX = 1023 + 100 * xPassed / timePassed;
sendY = 1023 + 100 * yPassed / timePassed;
if (sendX > 2047) {
sendX = 2047;
}
if (sendX < 0) {
sendX = 0;
}
if (sendY > 2047) {
sendY = 2047;
}
if (sendY < 0) {
sendY = 0;
}
for (int i = 0; i < 1; i++) { //Maybe this one is not needed. Will find it out later
mySBUS.Servo(tiltChannel, sendY);
mySBUS.Servo(panChannel, sendX);
// Update SBUS object and send data
mySBUS.Update();
mySBUS.Send();
delay(sbusWAIT);
}
xStampEnd = pulsesX;
yStampEnd = pulsesY;
timeStampEnd = millis();
M5.update();
}I'm using an inverter on the TX-----RX line...for (d-bus/s-bus)
tnks a lot